Here are some projects I've built!
Koggie: The Kognitos Robot
What I Did:
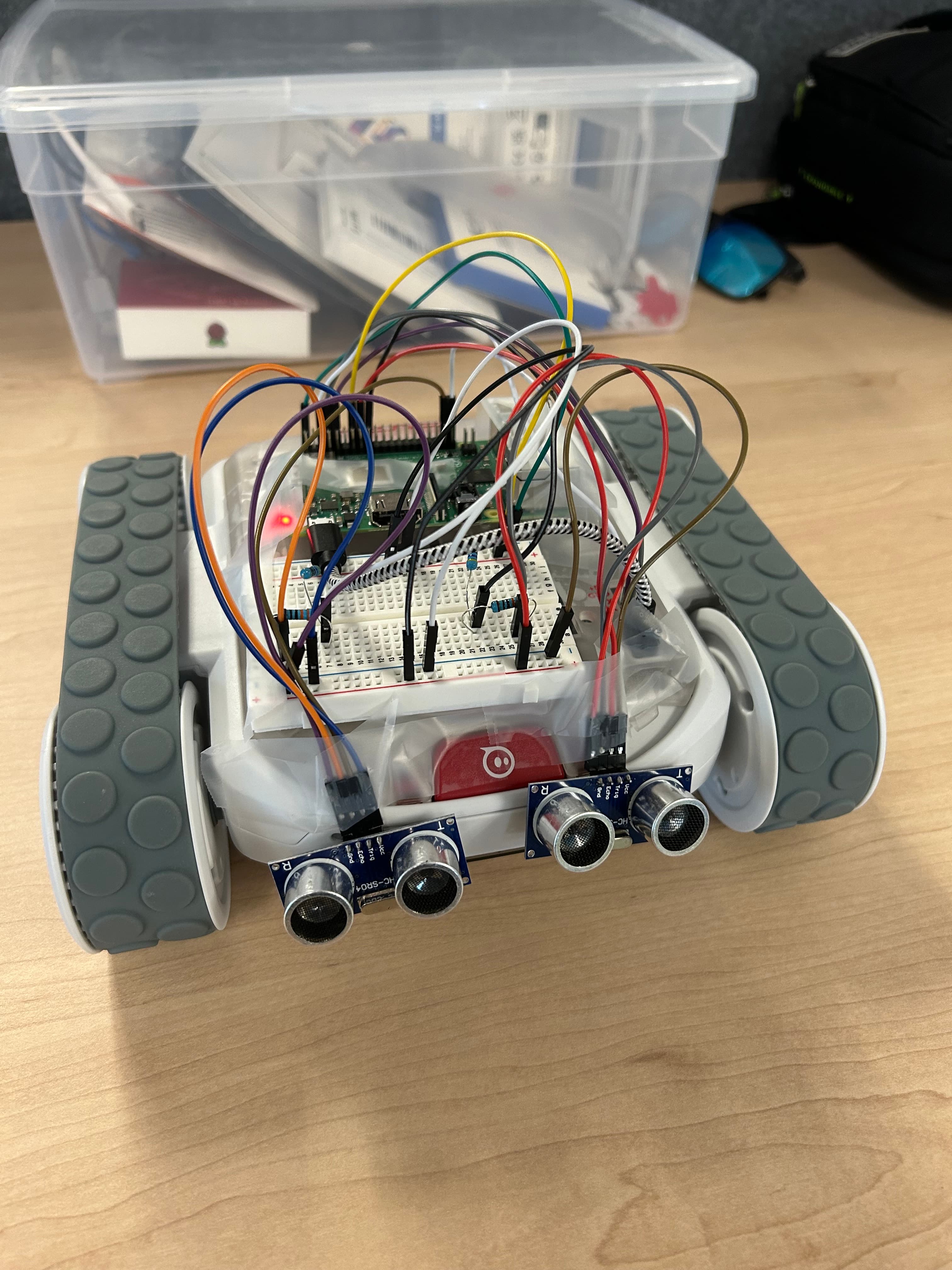
During my internship at Kognitos, a Series A startup backed by Khosla Ventures, I developed a robotics integration for the Kognitos natural language automation platform. This integration allows a user to command a robot by typing plain English commands. Here’s the differentiator: if the robot is about to crash- both on a software or physical level, it allows the user to “teach it” how to overcome the obstacle. Then, the robot resumes its user-defined task, without any work being lost! And the next time the robot runs into the same error, it can reference the technique it learned to overcome the roadblock without any further user guidance.
Technologies Used:
Raspberry Pi, Python, AWS SSM, AWS Lambda, Sphero SDK, Docker

Kognitos Excel Integration
What I Did:
My second project at Kognitos involved improving the capabilities of the existing Excel integration, which is an important use case of the Kognitos automation platform. I built a pipelined program with GPT-4o that extracted metadata from a spreadsheet corresponding to each table. Then, with an algorithm I iteratively developed, I found the coordinates of each corresponding table and extracted each table as a Python DataFrame object that a user could work with on the Kognitos platform. This algorithm had an 83% success rate at table identification on the platform and greatly improved upon the capabilities of the existing solution by providing the ability to work with both structured and unstructured spreadsheets.
Technologies Used:
Python, AWS Lambda, Docker
EnglishDB: Natural Language Database Querying
What I Did:
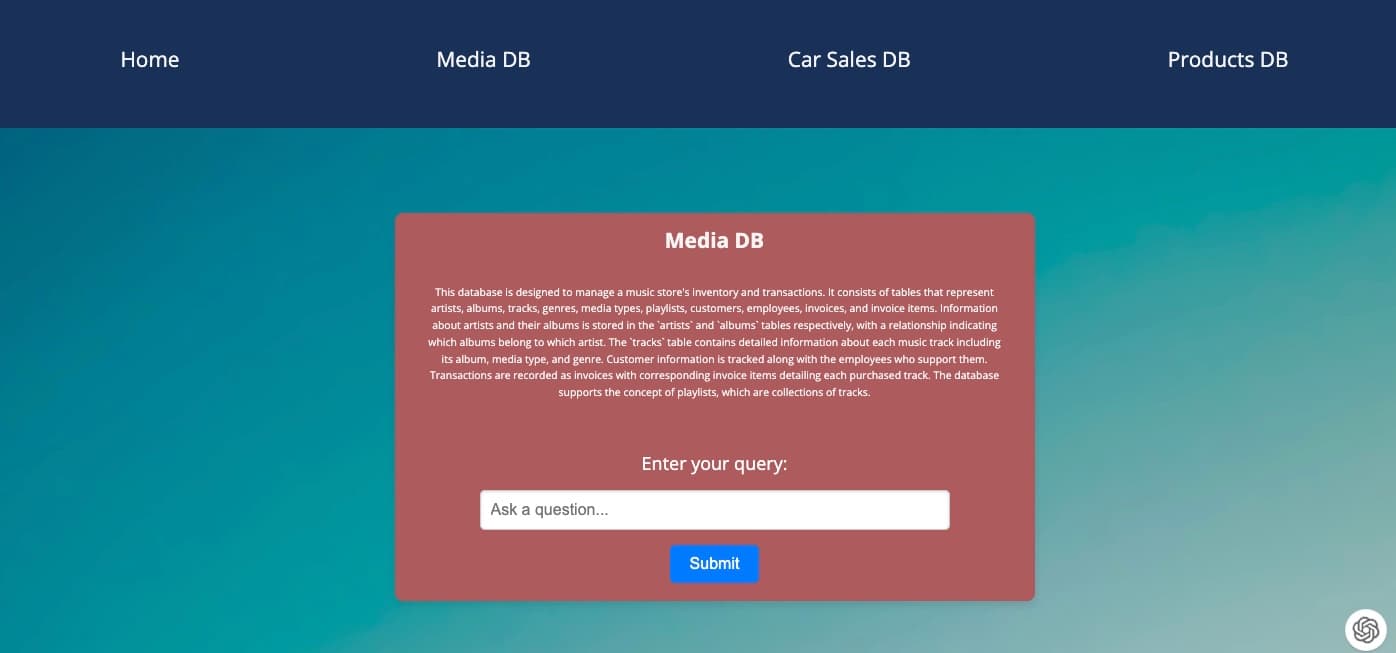
In this project, I leveraged OpenAI’s GPT-4 model to create an application capable of creating and running SQL queries against a database and producing the result to the user. On the application, users can select any of three databases to perform English-language queries against. To learn more about the database, they can construct high-level questions like “Tell me more about this database” or “What sort of data does this database contain”. Equipped with knowledge of the database, users can then formulate questions they have about the data in English, which an AWS Lambda function will use to create a SQL query (with a call to the OpenAI API), return the generated SQL, and run that against the database, producing the database query results back to the user.
Technologies Used:
React.js, SQLite, Python, AWS Lambda, OpenAI API, Shell

TriClub: The Social Triathlon Platform
What I Did:
This is a social platform and training tool designed specifically for triathletes. It brings you the most relevant data from your Strava activities to help you analyze your triathlon specific training. Users can also find other triathletes in their area at similar expertise levels to train with. I pulled Strava data using the Strava API, built real-time content feeds, and implemented direct-messaging between users with WebSockets.
Technologies Used:
Next.js, Supabase (PostgreSQL), Vercel, WebSockets, Strava API
Theta Tau Website
What I Did:
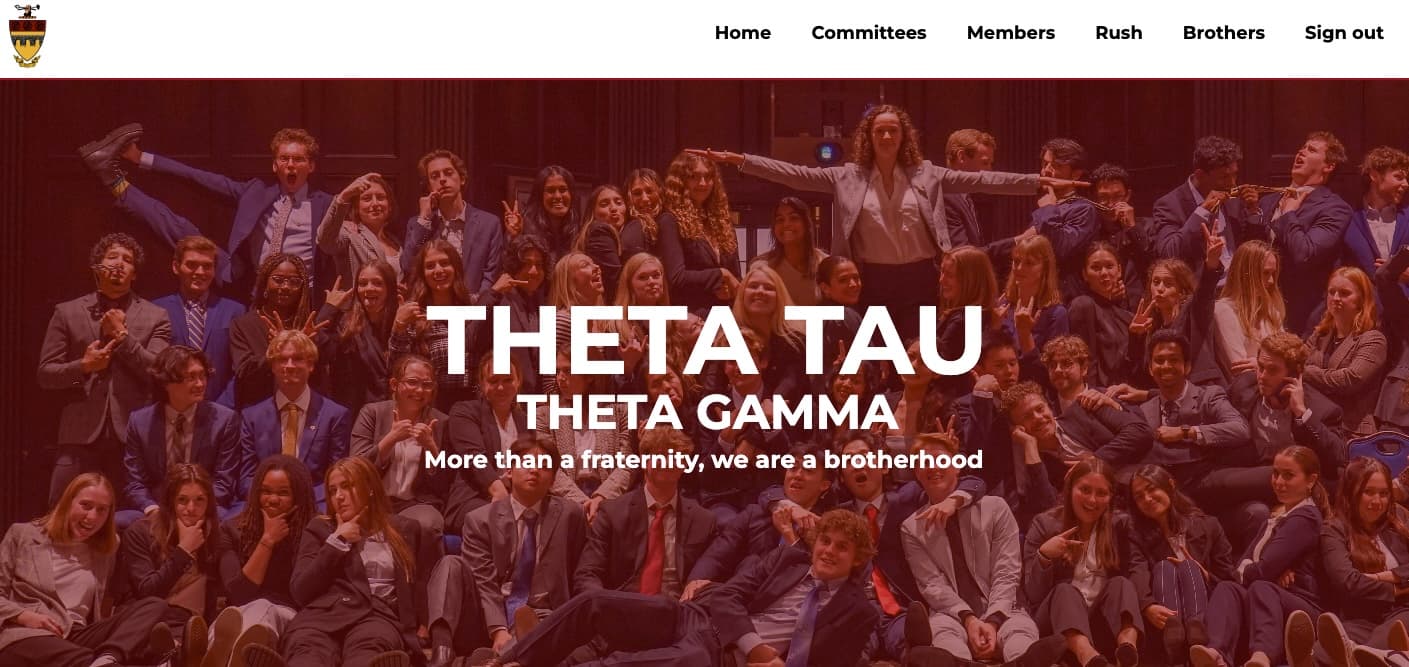
I am a part of Theta Tau, a professional Engineering fraternity at the University of Michigan. I am currently leading the design and development of a fraternity mobile application to streamline our new member recruitment process. We are building this application with the help of React Native, Tailwind CSS, and Supabase. I am also working on integrating fraternity dues payments with the Stripe API into the Theta Tau website, which would make fees collection much easier for our Treasurer.
Technologies Used:
Next.js, React Native, Tailwind CSS, Supabase (Postgres SQL), Stripe API

MRover Autonomy Subteam
What I Did:
As part of the Michigan Mars Rover Project Team, I am working on the Autonomy subteam, where we are building a completely autonomous system for the robot to navigate desert terrain, maneuver around obstacles, and collect samples as needed. I worked on an obstacle avoidance algorithm, that allowed the robot to maneuver around obstacles it detected on the course and find its way back to the designated path using the A* technique. We developed the algorithm in C++ and Python, utilizing ROS for real-time control and Gazebo for simulation testing. OpenCV was employed for obstacle detection and navigation. The algorithm demonstrated high accuracy in both simulated and real-world environments.
Technologies Used:
Python, C++, ROS, Gazebo, OpenCV